CS229 学习笔记之十四:隐马尔可夫模型基础
本篇博客为 CS229 学习笔记第十四部分,主题是:隐马尔可夫模型。
马尔可夫模型
马尔可夫模型是一种推理时间序列上状态变化的形式。给定一个状态集 \(S=\left\{s_{1}, s_{2}, \ldots s_{|S|}\right\}\),我们可以观察出一个随时间变化的序列 \(\vec{z} \in S^{T}\)。以一个天气系统的状态 \(S = \{sun, cloud, rain\}\) 为例,我们可以观察出一个 5 天(\(T= 5\))的天气变化序列 \(\{z_1 = s_{sun}, z_2 = s_{cloud},z_3 = s_{cloud},z_4 = s_{rain},z_5 = s_{cloud}\}\).
如果不进行某些限定,则时间 \(t\) 的状态 \(s_j\) 将会是任意数量变量的函数,将难以建模。因此,我们会提出两个马尔可夫假设来便于我们建模。第一个假设是有限地平线假设(limited horizon assumption),该假设指出时间 \(t\) 的状态的概率分布只取决于 \(t-1\) 时刻的状态。直观的理解就是时刻 \(t\) 状态代表了对过去的“足够”总结,可以合理地预测未来
\[ P\left(z_{t} | z_{t-1}, z_{t-2}, \ldots, z_{1}\right)=P\left(z_{t} | z_{t-1}\right) \] 第二个假设是平稳过程假设(stationary process assumption),该假设指出给定当前状态,下一个状态的条件分布不随时间变化,即:
\[ P\left(z_{t} | z_{t-1}\right)=P\left(z_{2} | z_{1}\right) ; t \in 2 \ldots T \] 为了方便,我们会假定存在一个初始状态和初始观察 \(z_{0} \equiv s_{0}\),其中 \(s_0\) 表示时刻 0 时状态的初始概率分布(可以理解为一个未知状态)。这种符号定义可以允许我们将真实初始状态 \(z_1\) 的先验分布用 \(P\left(z_{1} | z_{0}\right)\) 来表示。
因为对于任何状态序列都有 \(z_0 = s_0\),所以: \[ P\left(z_{t} | z_{t-1}, \ldots, z_{1}\right)=P\left(z_{t} | z_{t-1}, \ldots, z_{1}, z_{0}\right) \] 我们通过定义一个状态转移矩阵 \(A \in \mathbb{R}^{(|S|+1) \times(|S|+1)}\) 来参数化这些转变。\(A_{i j}\) 的值表示在任意时刻 \(t\) 从状态 \(i\) 转移到状态 \(j\) 的概率。下面给出关于天气状态的转换矩阵:
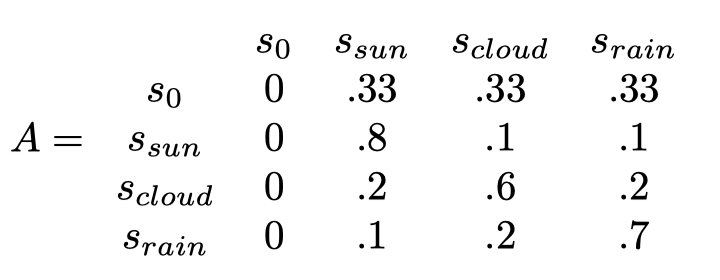
从概率可以看出天气是自相关的,即晴天趋向于保持晴天,多云趋向于保持多云。这种模式出现在很多马尔可夫模型中,可以总结为转换矩阵的强对角性。此外,在矩阵中,由初始状态转换为其他三个状态的概率是相同的。
马尔可夫模型的两个问题
基于上述两个假设以及状态转移矩阵 \(A\) ,针对一个马尔科夫链中的状态序列,我们可以提出两个问题:
- 一个特定的状态序列 \(\vec{z}\) 的概率是多少?
- 我们如何估计 \(A\) 的参数来最大化一个观测序列 \(\vec{z}\) 的概率?
一个状态序列的概率
我们可以通过概率的链式法则来计算一个特定状态序列 \(\vec{z}\) 的概率: \[ \begin{aligned} P(\vec{z}) &=P\left(z_{t}, z_{t-1}, \ldots, z_{1} ; A\right) \\ &=P\left(z_{t}, z_{t-1}, \ldots, z_{1}, z_{0} ; A\right) \\ &=P\left(z_{t} | z_{t-1}, z_{t-2}, \ldots, z_{1} ; A\right) P\left(z_{t-1} | z_{t-2}, \ldots, z_{1} ; A\right) \ldots P\left(z_{1} | z_{0} ; A\right) \\ &=P\left(z_{t} | z_{t-1} ; A\right) P\left(z_{t-1} | z_{t-2} ; A\right) \ldots P\left(z_{2} | z_{1} ; A\right) P\left(z_{1} | z_{0} ; A\right) \\ &=\prod_{t=1}^{T} P\left(z_{t} | z_{t-1} ; A\right) \\&= \prod_{t=1}^{T} A_{z_{t-1} z_{t}}\end{aligned} \]
第三行使用了链式法则(也可以理解为贝叶斯定理的重复),\(P(z_1 |z_0)\) 实际上是先验分布;第四行来源于马尔可夫假设。
以之前的天气序列为例,我们可以将 \(P\left(z_{1}=s_{s u n}, z_{2}=s_{c l o u d}, z_{3}=s_{r a i n}, z_{4}=s_{r a i n}, z_{5}=s_{c l o u d}\right)\) 表示为: \[ P\left(s_{s u n} | s_{0}\right) P\left(s_{c l o u d} | s_{s u n}\right) P\left(s_{r a i n} | s_{c l o u d}\right) P\left(s_{r a i n} | s_{r a i n}\right) P\left(s_{c l o u d} | s_{r a i n}\right) \\= .33 \times .1 \times .2 \times .7 \times .2 \]
最大似然参数赋值
从学习的观点来看,我们希望找到 \(A\) 的参数来最大化观测序列 \(\vec{z}\) 的对数似然函数。一个马尔科夫模型的对数似然函数定义如下:
\[ \begin{aligned} l(A) &=\log P(\vec{z} ; A) \\ &=\log \prod_{t=1}^{T} A_{z_{t-1} z_{t}} \\ &=\sum_{t=1}^{T} \log A_{z_{t-1} z_{t}} \\ &=\sum_{i=1}^{|S|} \sum_{j=1}^{|S|} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \log A_{i j} \end{aligned} \]
对于该优化问题,存在两个约束条件:
- 每个状态向下一个状态转变的概率之和为 1
- \(A\) 的所有元素都是非负的
基于以上两个约束,我们可以构建拉格朗日乘子: \[ \begin{align*} \max_{A} &\quad l(A) \\ \text{s.t.} &\quad \sum_{j=1}^{|S|} A_{i j}=1,\;i=1 . .|S| \\ &\quad A_{i j} \geq 0, \; i, j=1 . .|S| \end{align*} \]
我们将等式约束用到乘子构建中,而不等式约束可以被忽略,因为解总是为正数。
构建后的拉格朗日乘子为: \[ \mathcal{L}(A, \alpha)=\sum_{i=1}^{|S|} \sum_{j=1}^{|S|} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \log A_{i j}+\sum_{i=1}^{|S|} \alpha_{i}\left(1-\sum_{j=1}^{|S|} A_{i j}\right) \]
求偏导可以得到: \[ \begin{aligned} \frac{\partial \mathcal{L}(A, \alpha)}{\partial A_{i j}} &=\frac{\partial}{\partial A_{i j}}\left(\sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \log A_{i j}\right)+\frac{\partial}{\partial A_{i j}} \alpha_{i}\left(1-\sum_{j=1}^{|S|} A_{i j}\right) \\ &=\frac{1}{A_{i j}} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\}-\alpha_{i} \equiv 0 \\ & \Rightarrow A_{i j} =\frac{1}{\alpha_{i}} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \end{aligned} \] 将上式代回再对 \(\alpha\) 求偏导可得: \[ \begin{aligned} \frac{\partial \mathcal{L}(A, \beta)}{\partial \alpha_{i}} &=1-\sum_{j=1}^{|S|} A_{i j} \\ &=1-\sum_{j=1}^{|S|} \frac{1}{\alpha_{i}} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \equiv 0 \\ \Rightarrow \alpha &=\sum_{j=1}^{|S|} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \\ &=\sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i}\right\} \end{aligned} \] 将上式代回 \(A_{ij}\) 的表达式可以得到最终的输出为: \[ \hat{A}_{i j}=\frac{\sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\}}{\sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i}\right\}} \]
对上式的直观理解:从状态 \(i\) 转换至状态 \(j\) 的最大似然概率即为 \(i\) 向 \(j\) 转移的实际次数除以我们处于状态 \(i\) 的总次数。
隐马尔可夫模型
马尔科夫模型是对时间序列数据的有力抽象,但是如果我们无法观测到序列的状态,就无法进行抽象。隐马尔可夫模型可以用来解决这个问题,我们无法观测到实际的状态序列,而是观测到由状态生成的某个输出序列。
正式来说,在一个隐马尔可夫模型中,我们有如下序列:
一个观测输出序列:
\[ x=\left\{x_{1}, x_{2}, \dots, x_{T}\right\} \]
其取值自输出字典 \(V=\left\{v_{1}, v_{2}, \dots, v_{|V|}\right\}\),即 \(x_{t} \in V, t=1 .. T\)。
一个状态序列: \[ z=\left\{z_{1}, z_{2}, \dots, z_{T}\right\} \]
其取值自状态字典 \(S=\left\{s_{1}, s_{2}, \dots s_{|S|}\right\}\),即 \(z_{t} \in S, t=1 \ldots T\)。该序列是未知的(无法观测)。
在隐马尔可夫模型模型中,包含有两个矩阵:
- 一个是之前提到的状态转移矩阵 \(A\),\(A_{ij}\) 表示从状态 \(i\) 转移到状态 \(j\) 的概率
- 另一个矩阵 \(B\) 用于对由隐藏状态生成观测输出的概率建模
我们需要提出输出独立性假设: \[ P\left(x_{t}=v_{k} | z_{t}=s_{j}\right)=P\left(x_{t}=v_{k} | x_{1}, \ldots, x_{T}, z_{1}, \ldots, z_{T}\right) = B_{jk} \]
\(B_{jk}\) 表示给定当前时间的状态 \(s_j\),由该状态生成输出 \(v_k\) 的概率。
关于隐马尔可夫模型的三个问题
对于隐马尔可夫模型,我们可以提出三个基本问题: 1. 观测序列的概率是多少? 2. 最可能生成该观测序列的状态序列是什么? 3. 给定一些数据,我们如何学习出矩阵 \(A\) 和 \(B\) 的参数?
观测序列的概率:前向算法
在 HMM 中,我们假设观测序列是通过如下流程生成的:
假设存在一个基于时间序列的状态序列 \(\vec{z}\),该序列由马尔可夫模型生成,以状态转移矩阵 \(A\) 为参数;在每个时间步 \(t\),我们选择一个输出 \(x_t\) 作为状态 \(z_t\) 的函数。因此,为了计算观测序列的概率,我们需要将给定所有可能状态序列的 \(\vec{x}\) 的似然概率相加: \[ \begin{aligned} P(\vec{x} ; A, B) &=\sum_{\vec{z}} P(\vec{x}, \vec{z} ; A, B) \\ &=\sum_{\vec{z}} P(\vec{x} | \vec{z} ; A, B) P(\vec{z} ; A, B) \end{aligned} \]
上述公式对任何概率分布均成立。HMM 假设可以让我们对上述表达式进行简化: \[ \begin{aligned} P(\vec{x} ; A, B) &=\sum_{\vec{z}} P(\vec{x} | \vec{z} ; A, B) P(\vec{z} ; A, B) \\ &=\sum_{\vec{z}}\left(\prod_{t=1}^{T} P\left(x_{t} | z_{t} ; B\right)\right)\left(\prod_{t=1}^{T} P\left(z_{t} | z_{t-1} ; A\right)\right) \\ &=\sum_{\vec{z}}\left(\prod_{t=1}^{T} B_{z_{t} x_{t}}\right)\left(\prod_{t=1}^{T} A_{z_{t-1} z_{t}}\right) \end{aligned} \]
上述推导基于输出独立性假设及马尔可夫模型中提到的两个假设。然而,该求和是基于所有可能的状态序列,而 \(z_t\) 有 \(|S|\) 个可能的取值,所以直接求和的时间复杂度为 \(O(|S|^T)\) (\(T\) 是总时间步数)。
幸运的是,我们可以通过一种动态规划算法:前向算法来更快地计算 \(P(\vec{x} ; A, B)\)。首先我们定义一个量:\(\alpha_{i}(t)=P\left(x_{1}, x_{2}, \ldots, x_{t}, z_{t}=s_{i} ; A, B\right)\),其代表时间长度为 \(t\) 的所有观测值(状态不限)以及在时刻 \(t\) 状态为 \(s_i\) 的联合概率。
通过这样一个量,我们可以将之前的公式表示为: \[ \begin{aligned} P(\vec{x} ; A, B) &=P\left(x_{1}, x_{2}, \ldots, x_{T} ; A, B\right) \\ &=\sum_{i=1}^{|S|} P\left(x_{1}, x_{2}, \ldots, x_{T}, z_{T}=s_{i} ; A, B\right) \\ &=\sum_{i=1}^{|S|} \alpha_{i}(T) \end{aligned} \] 我们可以通过如下算法来快速地进行求解

每个时间步的时间复杂度仅为 \(O(|S|)\),算法总体时间复杂度为 \(O(|S| \cdot T)\)。除了前向算法之外,还有一个类似的后向算法用来计算如下概率: \[ \beta_{i}(t)=P\left(x_{T}, x_{T-1}, . ., x_{t+1}, z_{t}=s_{i} ; A, B\right) \]
最大似然状态序列:维特比算法
HMM 最常见的一个问题是:给定一个观测序列输出 \(\vec{x} \in V^{T}\),最可能的状态序列 \(\vec{z} \in S^{T}\) 是什么?
该问题可以用如下公式表达: \[ \arg \max _{\vec{z}} P(\vec{z} | \vec{x} ; A, B)=\arg \max _{\vec{z}} \frac{P(\vec{x}, \vec{z} ; A, B)}{\sum_{\vec{z}} P(\vec{x}, \vec{z} ; A, B)}=\arg \max _{\vec{z}} P(\vec{x}, \vec{z} ; A, B) \]
第一步运用了贝叶斯法则;第二步的依据是分母不与 \(\vec{z}\) 直接相关。
我们可以通过枚举法进行求解,但时间复杂度为 \(O(|S|^T)\),与之前类似,我们可以使用动态规划的方法来简化运算。用于求解上述问题的动态规划方法被称为维特比算法(Viterbi algorithm),其与前向算法十分类似,区别在于这里不需要追踪概率之和,而是追踪最大概率并记录其对应的状态序列。
参数学习:基于 EM 算法的 HMM
关于 HMM 的最后一个问题是:给定一个状态序列集,如何求解矩阵 \(A\) 和 \(B\) 中的参数?本节将使用 EM 算法来进行求解,下图给出了算法的基本流程(针对单个样本):
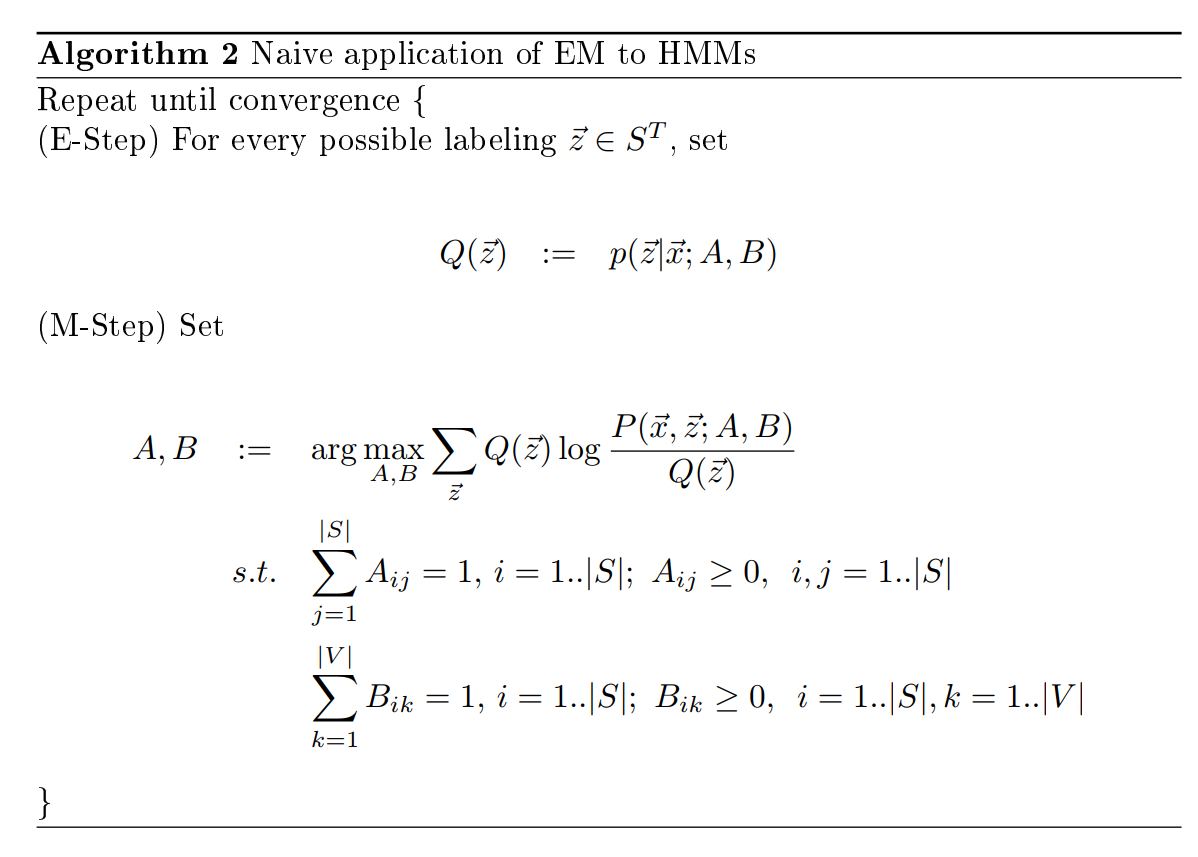
注意 M-step 中包含了约束条件(因为 \(A\) 和 \(B\) 中含有概率),我们将使用拉格朗日乘子来求解上述优化问题。此外,注意到在 E-step 和 M-step 中均需要枚举所有的状态序列,导致过大的时间复杂度。因此我们将使用之前提到的前向和后向算法来简化计算。
首先,使用马尔可夫假设来重写目标函数: \[ \begin{aligned} A,B &= \arg \max _{A, B} \sum_{\vec{z}} Q(\vec{z}) \log \frac{P(\vec{x}, \vec{z} ; A, B)}{Q(\vec{z})} \\ &= \arg \max _{A, B} \sum_{\vec{z}} Q(\vec{z}) \log P(\vec{x}, \vec{z} ; A, B)\\ &= \arg \max _{A, B} \sum_{\vec{z}} Q(\vec{z}) \log \left(\prod_{t=1}^{T} P\left(x_{t} | z_{t} ; B\right)\right)\left(\prod_{t=1}^{T} P\left(z_{t} | z_{t-1} ; A\right)\right)\\ &= \arg \max _{A, B} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} \log B_{z_{t} x_{t}}+\log A_{z_{t-1} z_{t}}\\ &= \arg \max _{A, B} \sum_{\vec{z}} Q(\vec{z}) \sum_{i=1}^{|S|} \sum_{j=1}^{|S|} \sum_{k=1}^{|V|}\sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} \log B_{j k}+1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \log A_{i j}\\ \end{aligned} \]
第二行去除了分母,因为其与 \(A\) 和 \(B\) 无关;第三行应用了马尔可夫假设;第五行使用指示函数来按状态索引 \(A\) 和 \(B\)。
下面构建拉格朗日乘子。与之前一样,因为解必为非负,所以不等约束可以忽略:
\[ \begin{aligned} \mathcal{L}(A, B, \delta, \epsilon)=& \sum_{\vec{z}} Q(\vec{z}) \sum_{i=1}^{|S|} \sum_{j=1}^{|S|} \sum_{k=1}^{|V|} \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} \log B_{j k}+1\left\{z_{t-1}=s_{i}\wedge z_{t}=s_{j}\right\}\log A_{i j}\\ &+\sum_{j=1}^{|S|} \epsilon_{j}\left(1-\sum_{k=1}^{|V|} B_{j k}\right)+\sum_{i=1}^{|S|} \delta_{i}\left(1-\sum_{j=1}^{|S|} A_{i j}\right) \end{aligned} \]
求偏导并将其设为 0 可得: \[ \begin{aligned} \frac{\partial \mathcal{L}(A, B, \delta, \epsilon)}{\partial A_{i j}} &=\sum_{\vec{z}} Q(\vec{z}) \frac{1}{A_{i j}} \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\}-\delta_{i} \equiv 0 \\ A_{i j} &=\frac{1}{\delta_{i}} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \end{aligned} \]
\[ \begin{aligned} \frac{\partial \mathcal{L}(A, B, \delta, \epsilon)}{\partial B_{j k}} &=\sum_{\vec{z}} Q(\vec{z}) \frac{1}{B_{j k}} \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\}-\epsilon_{j} \equiv 0 \\ B_{j k} &=\frac{1}{\epsilon_{j}} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} \end{aligned} \]
将上述结果代回并关于拉格朗日乘子求偏导可得: \[ \begin{aligned} \frac{\partial \mathcal{L}(A, B, \delta, \epsilon)}{\partial \delta_{i}} &=1-\sum_{j=1}^{|S|} A_{i j} \\ &=1-\sum_{j=1}^{|S|} \frac{1}{\delta_{i}} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \equiv 0 \\ \delta_{i} &=\sum_{j=1}^{|S|} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \\ &=\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i}\right\} \end{aligned} \]
\[ \begin{aligned} \frac{\partial \mathcal{L}(A, B, \delta, \epsilon)}{\partial \epsilon_{j}} &=1-\sum_{k=1}^{|V|} B_{j k} \\ &=1-\sum_{k=1}^{|V|} \frac{1}{\epsilon_{j}} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} \equiv 0 \\ \epsilon_{j} &=\sum_{k=1}^{|V|} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} \\ &=\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j}\right\} \end{aligned} \]
将上述结果代回,可以解得: \[ \begin{aligned} \hat{A}_{i j} &=\frac{\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\}}{\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i}\right\}} \\ \hat{B}_{j k} &=\frac{\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\}}{\sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j}\right\}} \end{aligned} \]
上述公式需要遍历所有状态序列,我们可以使用前向和后向概率来进行化简,首先对 \(\hat{A}_{i j}\) 的分子进行化简:
\[ \begin{aligned} & \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \\ = & \sum_{t=1}^{T} \sum_{\vec{z}} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} Q(\vec{z}) \\ = & \sum_{t=1}^{T} \sum_{\vec{z}} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} P(\vec{z} | \vec{x} ; A, B)\\ = & \frac{1}{P(\vec{x} ; A, B)} \sum_{t=1}^{T} \sum_{\vec{z}} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} P(\vec{z}, \vec{x} ; A, B)\\ = & \frac{1}{P(\vec{x} ; A, B)} \sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)\\ \end{aligned} \]
前两步进行了重新排列并引入了 \(Q\) 的定义;第三步使用了贝叶斯法则;第四步使用了各元素的定义。
类似地,分母也可以进行化简: \[ \begin{aligned} & \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i}\right\} \\=& \sum_{j=1}^{|S|} \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} \\=& \frac{1}{P(\vec{x} ; A, B)} \sum_{j=1}^{|S|} \sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1) \end{aligned} \] 将上述结果综合,可以得到: \[ \hat{A}_{i j}=\frac{\sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)}{\sum_{j=1}^{|S|} \sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)} \] 类似地,对 \(\hat{B}_{j k}\) 的分子进行如下化简: \[ \begin{aligned} & \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\}\\ = & \frac{1}{P(\vec{x} ; A, B)} \sum_{t=1}^{T} \sum_{\vec{z}} 1\left\{z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} P(\vec{z}, \vec{x} ; A, B)\\ = & \frac{1}{P(\vec{x} ; A, B)} \sum_{i=1}^{|S|} \sum_{t=1}^{T} \sum_{\vec{z}}1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j} \wedge x_{t}=v_{k}\right\} P(\vec{z}, \vec{x} ; A, B)\\ = & \frac{1}{P(\vec{x} ; A, B)} \sum_{i=1}^{|S|} \sum_{t=1}^{T} 1\left\{x_{t}=v_{k}\right\} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)\\ \end{aligned} \] 同理,其分母可以表示为: \[ \begin{aligned} & \sum_{\vec{z}} Q(\vec{z}) \sum_{t=1}^{T} 1\left\{z_{t}=s_{j}\right\} \\=& \frac{1}{P(\vec{x} ; A, B)} \sum_{i=1}^{|S|} \sum_{t=1}^{T} \sum_{\vec{z}}1\left\{z_{t-1}=s_{i} \wedge z_{t}=s_{j}\right\} P(\vec{z}, \vec{x} ; A, B) \\=& \frac{1}{P(\vec{x} ; A, B)} \sum_{i=1}^{|S|} \sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1) \end{aligned} \] 将上述结果综合,可以得到: \[ \hat{B}_{j k}=\frac{\sum_{i=1}^{|S|} \sum_{t=1}^{T} 1\left\{x_{t}=v_{k}\right\} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)}{\sum_{i=1}^{|S|} \sum_{t=1}^{T} \alpha_{i}(t) A_{i j} B_{j x_{t}} \beta_{j}(t+1)} \] 基于上述结果,可以提出用于 HMM 参数学习的前向-后向算法,该算法也被称为 Baum-Welch 算法:
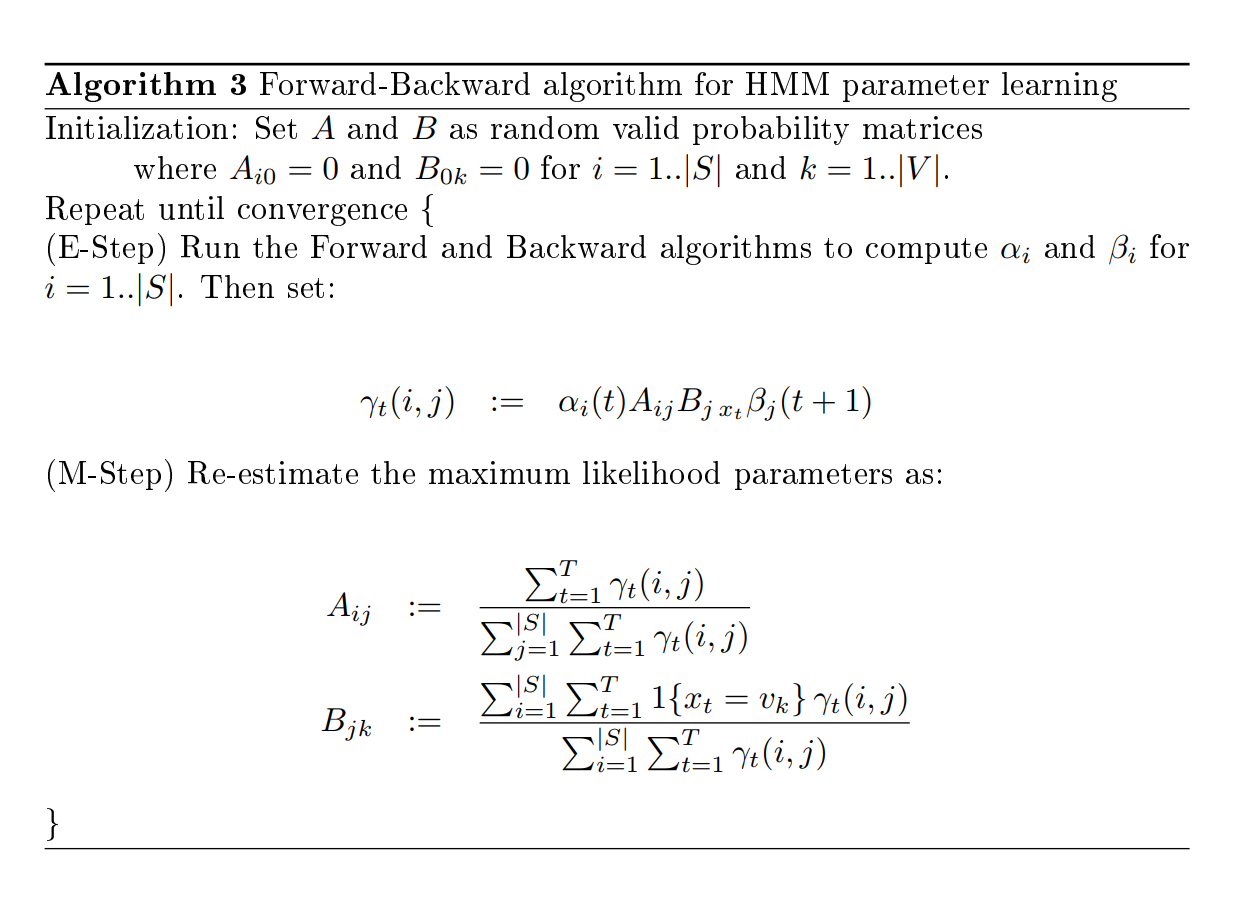
与许多 EM 算法的应用类似,该算法是一个非凸优化问题,存在许多局部最优解。EM 算法将基于初始值收敛至最大值,因此可以考虑多次运行算法。此外,对由 \(A\) 和 \(B\) 表示的概率分布进行平滑处理也十分重要,即没有转移或生成为 0 概率(除去初始情况)。
思维导图
